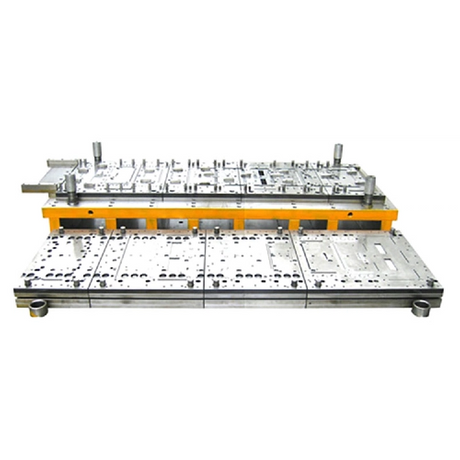
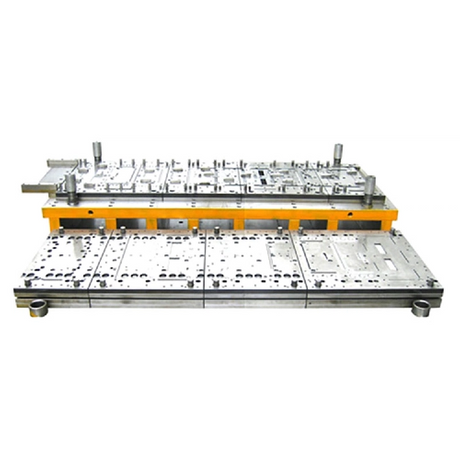
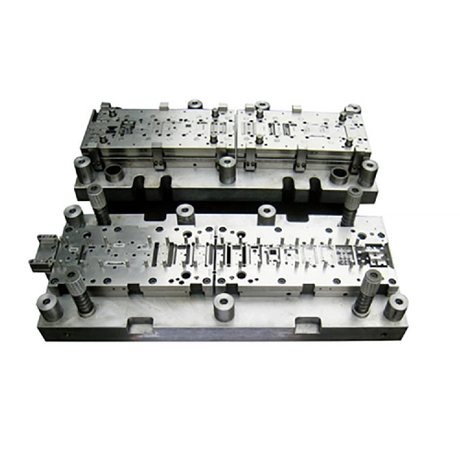
หุ่นยนต์แขนหรือที่เรียกว่าหุ่นยนต์ปั๊มเป็นอุปกรณ์พิเศษที่ออกแบบมาสำหรับการผลิตการเจาะครั้งเดียวโดยอัตโนมัติตามกระบวนการปั๊มที่แตกต่างกัน หุ่นยนต์เจาะแบ่งออกเป็น: หุ่นยนต์เจาะแผ่นเจาะเดี่ยว หุ่นยนต์เจาะหลายสถานี หมัดเดียว หุ่นยนต์ออนไลน์หลายสถานีหลายหมัด หุ่นยนต์เจาะน้ำวิ่งหลายหมัด หุ่นยนต์ให้อาหารสั่นสถานีเดียว .เครื่องเจาะประกอบด้วยตัวยกวัสดุ แกน x สำหรับการเคลื่อนที่ซ้ายและขวา แกน Z สำหรับการเคลื่อนที่ในแนวตั้ง แขนกลแบบหดกลับสำหรับแกน X ระบบควบคุม หุ่นยนต์เจาะหลายสถานีหลายเครื่อง รวมถึงเวิร์กสเตชันเสริมและอุปกรณ์รีเลย์
ขอบเขตการปฏิบัติของ หุ่นยนต์แขน เป็น:
1. การผลิตหมัดเดียวความเร็วต่ำ
2. แม่พิมพ์เป็นแม่พิมพ์ปั๊มคอมโพสิตธรรมดา
3. การเจาะเครื่องบิน, การตัดแต่ง, การสร้าง, การยืดและกระบวนการอื่น ๆ การปั๊มต้องใช้การปั๊มขึ้นรูปในแนวตั้ง
4. วัสดุและผลิตภัณฑ์มีตำแหน่งให้แขนหุ่นยนต์หยิบหรือหนีบ
5. หลังจากการปั๊มขึ้นรูป ผลิตภัณฑ์จะหลุดออกจากแม่พิมพ์
6. หลังจากการปั๊ม ระยะห่างระหว่างแม่พิมพ์บนและล่างจะต้องอยู่ที่ 60 มม. หรือนานกว่านั้น
7.ผลิตภัณฑ์ที่ใช้กันทั่วไป: อะไหล่รถยนต์ ชิ้นส่วนเครื่องใช้ในบ้าน ผลิตภัณฑ์การสื่อสารและอุปกรณ์เสริม